LMEC-7 ポールの振り子
LMEC-7ポールの振り子
実験
1.自由振動 - テンプの振幅θと自由振動周期Tの対応関係の測定
2.減衰係数βの決定。
3.強制振動の振幅-周波数特性および位相-周波数特性曲線の決定。
4.異なる減衰が強制振動に及ぼす影響の研究と共振現象の観察。
5.ストロボ法を使用して、位相差などの移動する物体の特定の量を決定する方法を学びます。
主な仕様
| 春の頑固さ係数K | 自由振動周期の変化は2%未満 |
| 時間測定 | 精度0.001秒、サイクル測定誤差0.2% |
| 機械式振り子 | インデックススロット付き、インデックス2°、半径100 mm |
| 振幅測定 | 誤差±1° |
| 光電センサA | 二重光電信号の検出 |
| 光電センサーB | 単一光電信号の検出 |
| モーター速度(強制周波数)範囲 | 30~45rpm、連続調整可能 |
| モーター速度の不安定さ | 0.05%未満で安定したテストサイクルを確保 |
| システムダンピング | 振幅減衰あたり2°未満 |
詳細
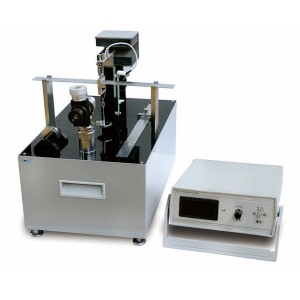
システム構成: ポール共鳴実験装置、ポール共鳴実験制御装置、別個のフラッシュアセンブリ、光電センサー2個(タイプAとタイプB各1個)
ポール共鳴実験装置。
1. ばね頑強係数K:自由振動周期の変化が2%未満。
2. 時間測定(10サイクル):精度0.001秒、サイクル測定誤差0.2%。
3. 電磁減衰がない場合のシステム減衰:振幅減衰あたり 2° 未満。
4. 機械式振り子:インデックススロット付き、インデックス2°、半径100 mm。
5.振幅測定:誤差±1°、振幅測定方法:光電検出。
6. 光電センサーA:二重光電信号の検出;光電センサーB:単一光電信号の検出。
7. モーター速度(強制周波数)範囲:30~45rpm、連続調整可能。
8. モーター速度の不安定性:0.05% 未満で、安定したテスト サイクルを保証します。
9.位相差の決定。
位相差を決定する方法は 2 つあり、ストロボ方式と計量方式の 2 種類があります。2 つの方法間の偏差は 3° 未満です。
計量方法の測定範囲は50°~160°です。
ストロボ測定範囲は 0° ~ 180°、繰り返し測定偏差は 2° 未満です。
10. フラッシュ: 低電圧駆動、実験ユニットとは別のフラッシュ、連続フラッシュ時間 2 ミリ秒、色は目を引く赤色。
11. 騒音が少なく、グループ実験中に妨害や不快感が生じません。
ポール共鳴実験コントローラ。
1. 特別な実験コントローラを使用してデータを収集し、表示します。大きなドットマトリックス LCD ディスプレイが使用され、メニューによって実験をガイドし、メモ (電子取扱説明書) を促し、実験データの表示と確認を行います。
2. ストロボ専用の制御インターフェース。